
Zespół Legendary Rover, który tworzą studenci Politechniki Rzeszowskiej, zdobył drugie miejsce w międzynarodowych zawodach IRDC – za projekt łazika służącego do eksploracji jaskiń lawowych na Marsie.
International Rover Design Challege (IRDC) to organizowany przez Mars Society South Asia konkurs dla studentów uczelni wyższych, którego celem jest zaprojektowanie łazika gotowego do działania na Marsie. W tegorocznej edycji zespoły miały za zadanie zaprojektować łazik zdolny do eksploracji jaskiń lawowych, które powstały na Marsie wskutek jego dawnej aktywności wulkanicznej.
W konkursie organizowanym przez Mars Society South Asia po raz pierwszy wzięli udział rzeszowscy studenci z Legendary Rover Team. Zespół biorący udział w konkursie to 15 osób w składzie: Hubert Gross – lider projektu, Kamil Ziółkowski i Michał Słomiany – odpowiedzialni za nawigację, skanowanie powierzchni jaskiń oraz komunikację, Adam Szelec, Marcin Machowski i Miłosz Bar – konstruktorzy kół i zawieszenia, Nikodem Drąg – konstruktor manipulatora, Michał Radawiec i Konrad Kij – projektanci systemu rakietowego do poboru próbek, Łukasz Bańczyk i Kamil Siek – opracowanie systemu zasilania, Aleksandra Wanat – opracowanie systemu wizji i fotografii, Jakub Kędzierski – projekt dwustopniowej przekładni cykloidalnej jako element manipulatora, Iwona Grzymysławska – redakcja tekstu i układ raportu oraz Ignacy Cofała – wykonanie animacji z modelem łazika.
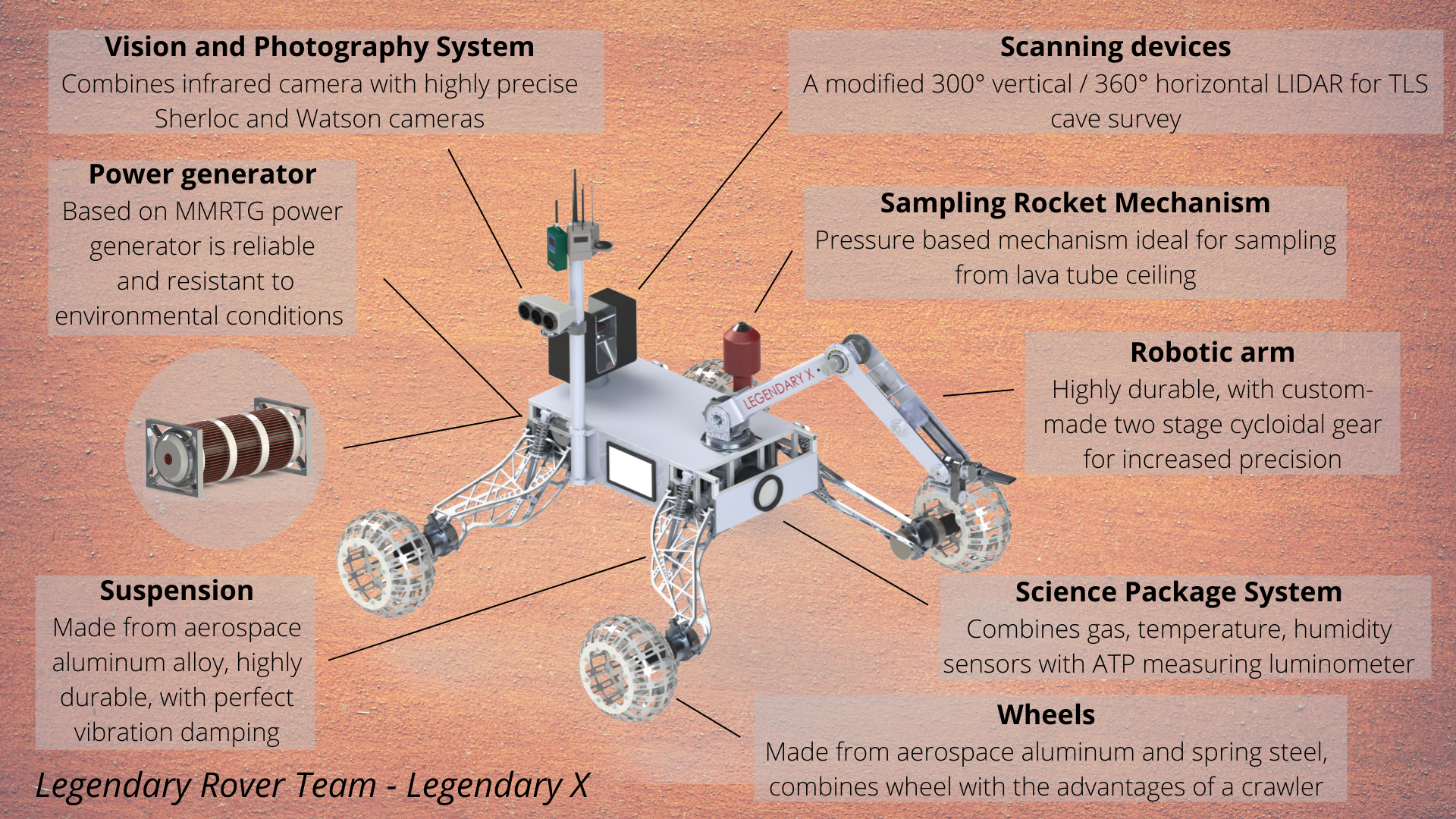
Na ilustracji: Projekt zespołu. Źródło: Legendary Rover Team
Jaskinie lawowe na Marsie to temat na topie w agencjach kosmicznych na całym świecie, dzięki potencjalnie dobrym warunkom do założenia w nich stałej bazy. Zanim jednak ludzkość zdecyduje się założyć bazę w tego typu strukturze, warto wykonać rekonesans tych miejsc za pomocą robota badawczego. Największą trudnością w autonomicznej eksploracji jaskiń był dobór sprzętu do komunikacji, skanowanie terenu oraz uniezależnienie łazika od energii słonecznej – mówi Hubert Gross, lider projektu.
Proces projektowania robota poruszającego się pod powierzchnią Marsa różni się od tworzenia naziemnych robotów. Warunki panujące w jaskiniach lawowych na Marsie różnią się znacznie od warunków panujących na Ziemi, a w szczególności tych, które znamy z jej powierzchni. Skład chemiczny atmosfery, prędkość wiatru, ciśnienie, grawitacja, temperatury, pył, topografia, możliwość komunikacji, autonomiczne poruszanie się są znacząco różne. Wpływa to na mobilność łazika, nawigację (brak punktu odniesienia, ciemność panująca w jaskini, możliwość wpadnięcia w „ślepą uliczkę”), parametry fizyczne, elektronikę (ekstremalne temperatury, promieniowanie), pracę sprzętu (drobny pył, trudna do analizy topografia terenu) i wiele innych.
Jednym z ważniejszych podsystemów łazika był układ jezdny. Możliwość poruszania się w trudnym terenie jest jednym z podstawowych problemów, z jakim spotykają się konstruktorzy. W naszym projekcie wykorzystaliśmy koła ze specjalnie formowanej blachy sprężynowej, które w wyniku nacisku łazika na podłoże delikatnie się odkształcają, zachowując się podobnie do pojazdów gąsienicowych – mówią Adam Szelec, Miłosz Bar i Marcin Machowski odpowiedzialni za konstrukcję układu jezdnego.
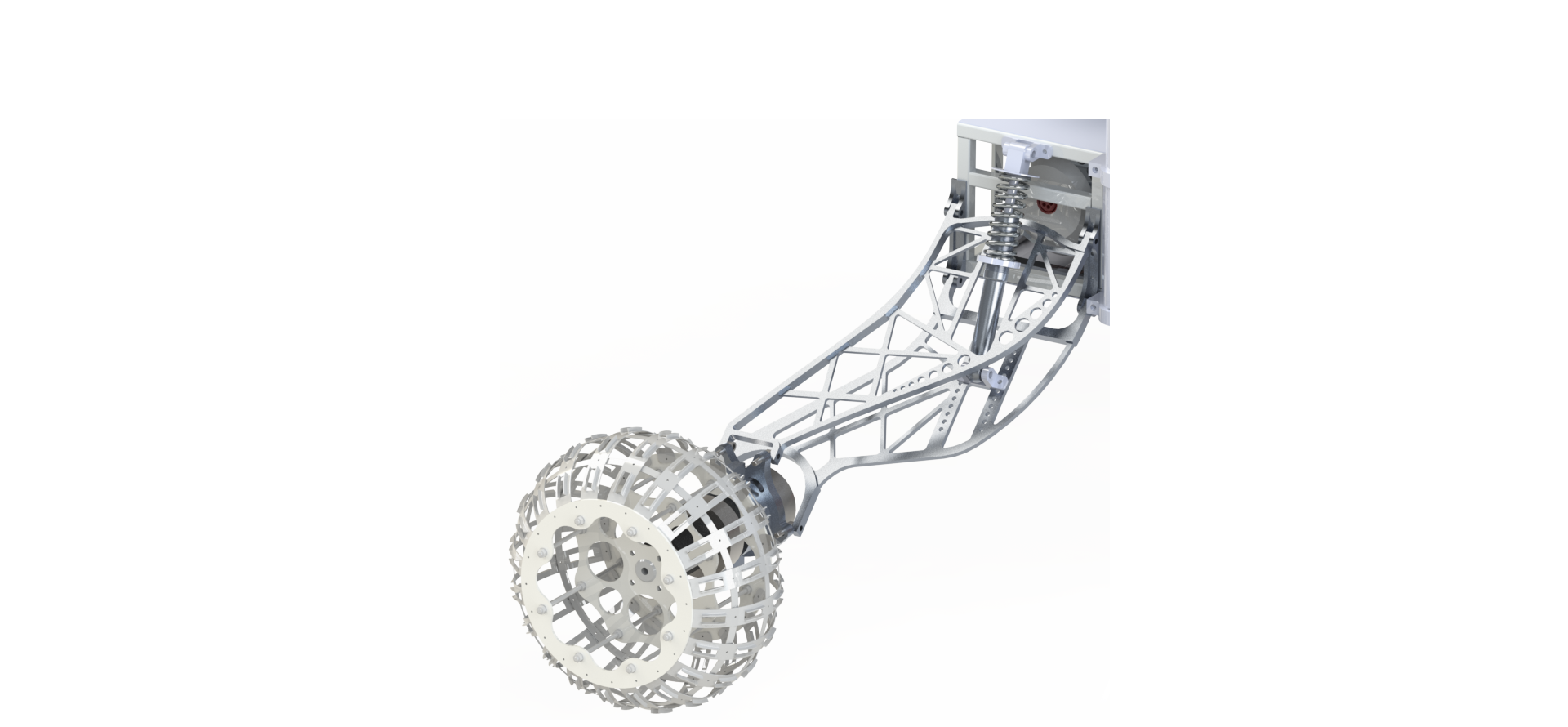
Na ilustracji: Fragment zawieszenia wraz z kołem. Źródło: Legendary Rover Team
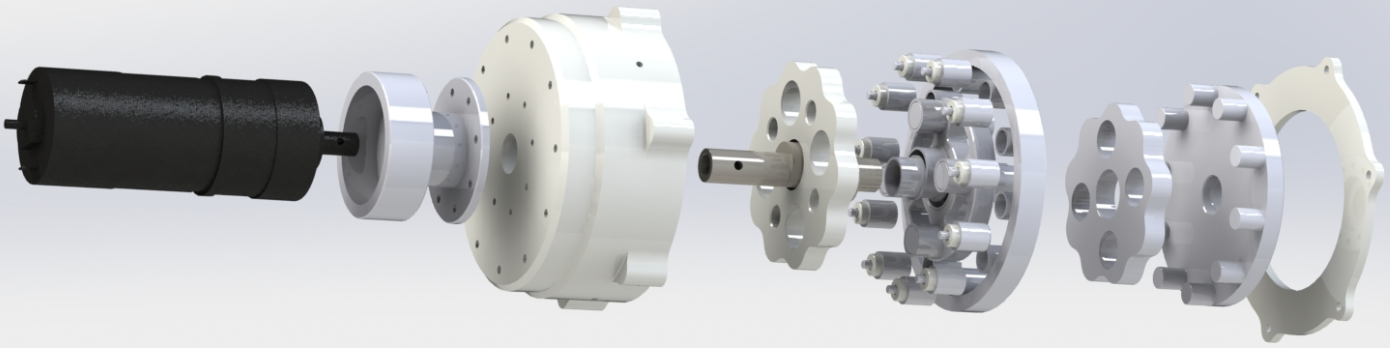
Na ilustracji: Przekładnia cykloidalna projektu Jakuba Kędzierskiego. Źródło: Legendary Rover Team
Podczas projektowania łazika konieczne było spełnienie warunków narzuconych przez organizatorów, czyli wykonanie rekonesansu wraz ze skanem terenu, pobór próbki z sufitu jaskini o wysokości minimum 50 metrów, wykonanie analizy atmosfery marsjańskiej wraz z pomiarami obecności gazów, wilgotności i temperatury oraz poprawna komunikacja z bazą położoną niedaleko jaskini na powierzchni Czerwonej Planety.
Łączność łazika z bazą była jednym z trudniejszych aspektów podejmowanych przez drużynę. Od bazy oddzielała nas nie tylko odległość w atmosferze, ale też od kilkudziesięciu do kilkuset metrów bazaltu, co znacznie ograniczyło możliwość komunikacji. Aby sprostać temu wyzwaniu, zastosowaliśmy m.in. elementy łączności stosowanych w kopalniach i jaskiniach, tj. komunikację Through-the-Earth (TTE), która wykorzystuje fale ULF o ultra niskiej częstotliwości – wyjaśnia Kamil Ziółkowski odpowiedzialny za systemy łączności.
Jako innowację zastosowano rakietowy system poboru próbek z sufitu jaskini. System składa się z małej wyrzutni pneumatycznej, mechanizmu ustawiającego kąt wyrzutni oraz rakiety balistycznej z „pojemnikiem-pułapką”, który podczas uderzenia w sufit wyłapuje odłamki skały. Ze względu na małą gęstość atmosfery marsjańskiej do stabilizacji rakiety zamiast stateczników wykorzystano rozwijającą się za rakietą cienką, stalową linkę na wzór systemów wyrzutni służących do przerzucania lin między statkami na morzu.
Kolejną nowością było zastosowanie dwustopniowej przekładni cykloidalnej w ramieniu robotycznym. Jej konstrukcja jest nowym połączeniem i modyfikacją kilku rozwiązań dostępnych na rynku. Dzięki temu zabiegowi mogliśmy stworzyć niezwykle małą konstrukcję o dużym przełożeniu, małej masie i dużej precyzji pozycjonowania. Jest to niezwykle ważne szczególnie w przypadku odzyskania rakiety po upadku na ziemię czy poboru próbek z podłoża jaskini – opowiada Jakub Kędzierski, konstruktor przekładni cykloidalnej.

Na ilustracji: Ogłoszenie wyników konkursu. Źródło: Mars Society South Asia
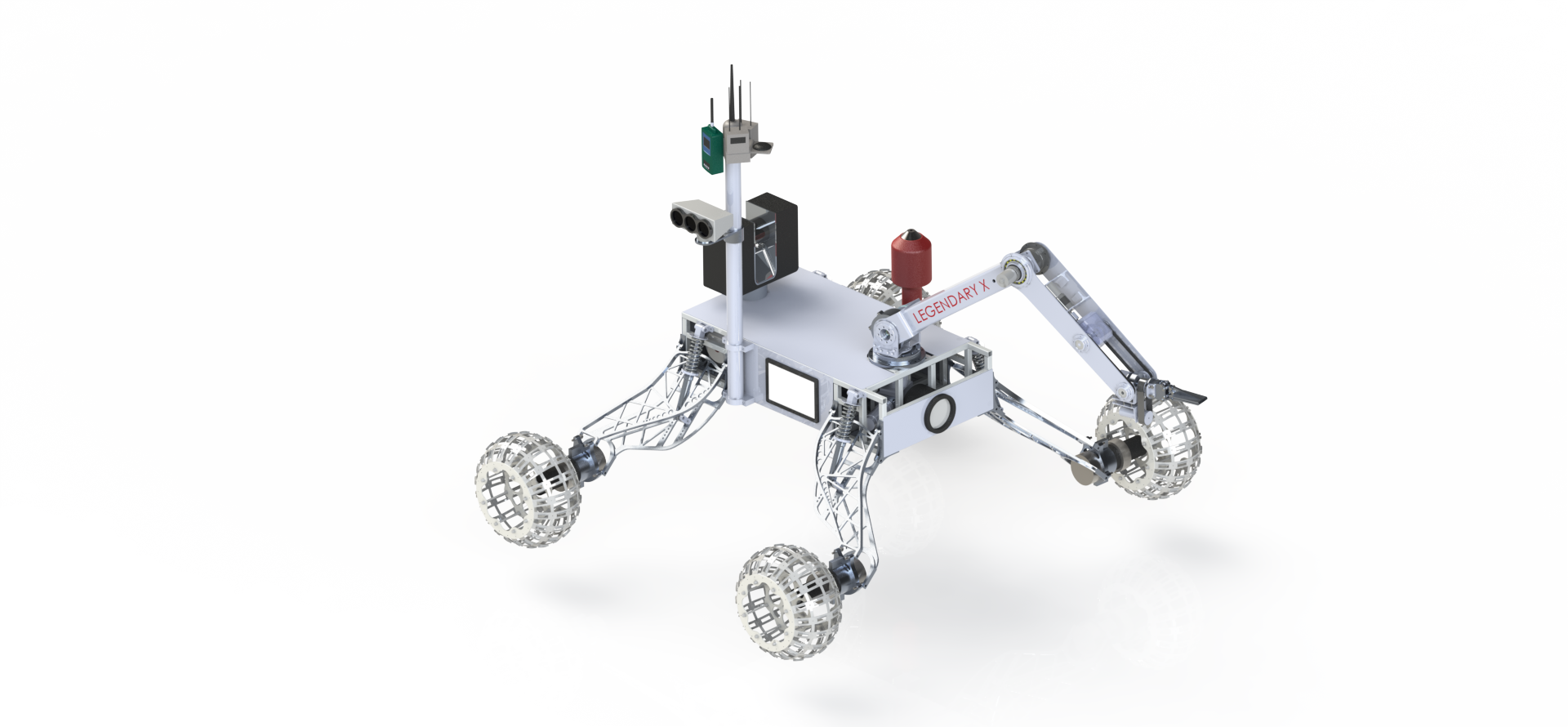
Na ilustracji: Projekt łazika marsjańskiego. Źródło: Legendary Rover Team
Legendary Rover Team zajmuje się konstruowaniem łazików marsjańskich. Dotychczas jej największym sukcesem była dwukrotna wygrana w University Rover Challenge, prestiżowych, międzynarodowych zawodach odbywających się w Utah, USA oraz IPAS Challenge, w których zajęli 1 miejsce za projekt drona zdolnego do lotu na Marsie. W przyszłości planują wziąć udział w kolejnych edycjach konkursu IRDC oraz wyzwaniach związanych z branżą kosmiczną.
Czytaj więcej:
- Mars Society South Asia – strona zawodów
- International Rover Challenge – strona na Facebooku z ogłoszonymi wynikami
- Projekt marsjańskiego drona nagrodzony w międzynarodowym konkursie
Źródło: Legendary Rover Team
Opracowanie: Elżbieta Kuligowska
Na zdjęciu: Łazik drużyny Legendary Rover Team konstruowany na zawody w Polsce i USA.





