W ubiegłym tygodniu astronauta ESA Andreas Mogensen okazał się prawdziwym ekspertem w prowadzeniu pojazdów z przestrzeni kosmicznej. W ramach projektu o nazwie Meteron (ESA) Mogensen, który aktualnie przebywa w Międzynarodowej Stacji Kosmicznej, poprowadził łazik znajdujący się w ośrodku badawczym w Holandii ustawiony na atrapie bazy księżycowej.
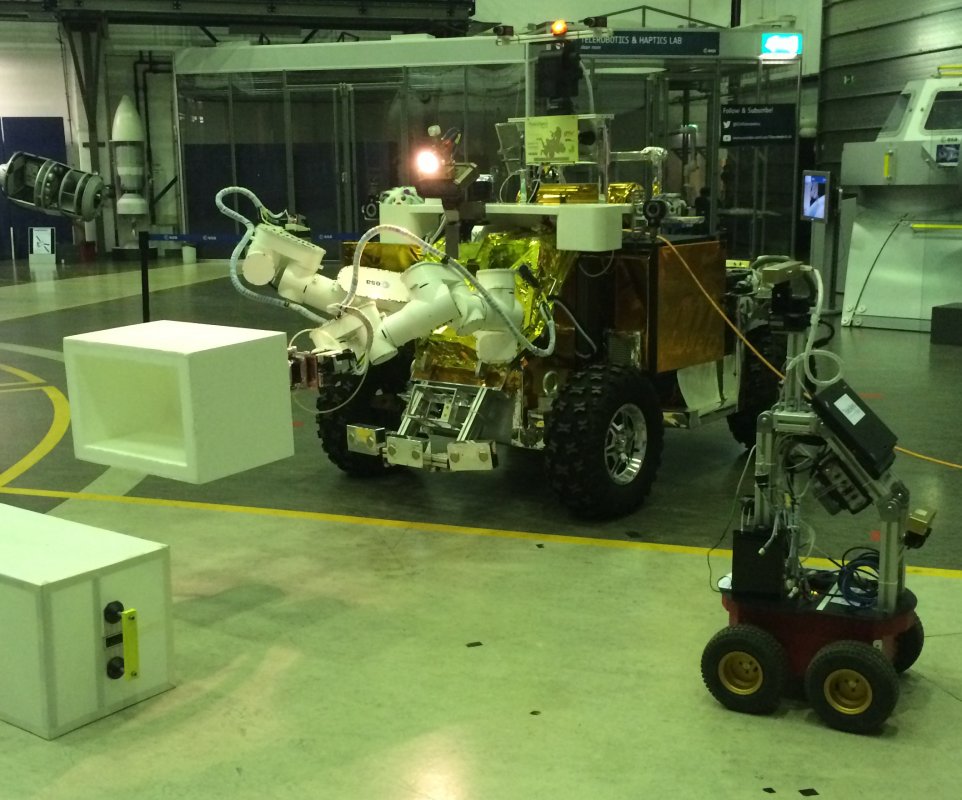
Andreas bezpośrednio sterował łazikiem Eurobot – który ma wielkość samochodu osobowego – którego zadaniem rozwiązanie problemu w symulowanej bazie księżycowej. Drugi łazik sterowany był z centrum ESA w Niemczech – dzięki czemu Andreas mógł skupić się na Eurobocie i w razie konieczności podjąć odpowiednią interwencję.
Nowy interfejs użytkownika do sterowania łazikiem z przestrzeni kosmicznej pracował bez zarzutu. Oba łaziki funkcjonowały w pełnej harmonii na przylegających sobie działkach. Eksperyment przebiegał na tyle bezproblemowo, że został ukończony w ciągu jednej sesji – zamiast planowych trzech sesji rozłożonych na dwa dni.
„Dzięki eksperymentowi wiemy, że jesteśmy w stanie sterować robotami na powierzchni Księżyca ze stacji znajdującej się na orbicie. Jest to temat aktualnie szczegółowo badany przez ESA” – wyjaśniła Jessica Grenouilleau, inżynier systemów w projekcie Meteron.
Dostarczenie astronautów na odległy obiekt to jedno, trzeba też dostarczyć im paliwo i wyposażenie wystarczające na wykonanie prac i powrót na Ziemię po ich zakończeniu. Wysyłanie robotów do zbadania potencjalnych miejsc lądowania oraz przygotowanie habitatów dla ludzi wydaje się wydajniejsze i bezpieczniejsze – szczególnie jeżeli roboty sterowane są przez astronautów, którzy mogą na bieżąco reagować i wczuwać się w aktualną sytuację znacznie lepiej niż komputery.
Meteron opracowuje sieci komunikacyjne, interfejsy oraz sprzęt niezbędny do sterowania robotami na odległość z orbity. Międzynarodowa Stacja Kosmiczna została wykorzystana jako stanowisko testowe, a znajdujący się na jej pokładzie astronauta kierował łazikami poruszającymi się na powierzchni Ziemi.
Doświadczenie dowiodło, że roboty mogą wykonywać wartościowe zadania i płynnie ze sobą współpracować, nawet jeżeli są sterowane z dwóch zupełnie innych lokalizacji.
W ramach eksperymentu potwierdzono także, że interfejs użytkownika działa prawidłowo, a „kosmiczny Internet” ESA może przesyłać pięć sygnałów wideo na pokład stacji krążącej z prędkością 28 800 km/h na wysokości około 400 km bez znaczących opóźnień i w dobrej jakości. Co więcej, sieć dobrze radzi sobie z chwilowymi utratami połączenia, które zdarzają się stosunkowo często podczas operacji realizowanych w przestrzeni kosmicznej.
Interfejs użytkownika został zaprojektowany dla ESA przez młody zespół z Thales Alenia Space we Włoszech, który musiał pracować bardzo intensywnie, aby zmieścić się w ciasnych terminach i zakończyć prace przed misją Andreasa.
Więcej informacji:
Źródło: ESA
Zdjęcie: Łazik Eurobot, źródło: ESA
Andreas bezpośrednio sterował łazikiem Eurobot – który ma wielkość samochodu osobowego – którego zadaniem rozwiązanie problemu w symulowanej bazie księżycowej. Drugi łazik sterowany był z centrum ESA w Niemczech – dzięki czemu Andreas mógł skupić się na Eurobocie i w razie konieczności podjąć odpowiednią interwencję.
Nowy interfejs użytkownika do sterowania łazikiem z przestrzeni kosmicznej pracował bez zarzutu. Oba łaziki funkcjonowały w pełnej harmonii na przylegających sobie działkach. Eksperyment przebiegał na tyle bezproblemowo, że został ukończony w ciągu jednej sesji – zamiast planowych trzech sesji rozłożonych na dwa dni.
„Dzięki eksperymentowi wiemy, że jesteśmy w stanie sterować robotami na powierzchni Księżyca ze stacji znajdującej się na orbicie. Jest to temat aktualnie szczegółowo badany przez ESA” – wyjaśniła Jessica Grenouilleau, inżynier systemów w projekcie Meteron.
Dostarczenie astronautów na odległy obiekt to jedno, trzeba też dostarczyć im paliwo i wyposażenie wystarczające na wykonanie prac i powrót na Ziemię po ich zakończeniu. Wysyłanie robotów do zbadania potencjalnych miejsc lądowania oraz przygotowanie habitatów dla ludzi wydaje się wydajniejsze i bezpieczniejsze – szczególnie jeżeli roboty sterowane są przez astronautów, którzy mogą na bieżąco reagować i wczuwać się w aktualną sytuację znacznie lepiej niż komputery.
Meteron opracowuje sieci komunikacyjne, interfejsy oraz sprzęt niezbędny do sterowania robotami na odległość z orbity. Międzynarodowa Stacja Kosmiczna została wykorzystana jako stanowisko testowe, a znajdujący się na jej pokładzie astronauta kierował łazikami poruszającymi się na powierzchni Ziemi.
Doświadczenie dowiodło, że roboty mogą wykonywać wartościowe zadania i płynnie ze sobą współpracować, nawet jeżeli są sterowane z dwóch zupełnie innych lokalizacji.
W ramach eksperymentu potwierdzono także, że interfejs użytkownika działa prawidłowo, a „kosmiczny Internet” ESA może przesyłać pięć sygnałów wideo na pokład stacji krążącej z prędkością 28 800 km/h na wysokości około 400 km bez znaczących opóźnień i w dobrej jakości. Co więcej, sieć dobrze radzi sobie z chwilowymi utratami połączenia, które zdarzają się stosunkowo często podczas operacji realizowanych w przestrzeni kosmicznej.
Interfejs użytkownika został zaprojektowany dla ESA przez młody zespół z Thales Alenia Space we Włoszech, który musiał pracować bardzo intensywnie, aby zmieścić się w ciasnych terminach i zakończyć prace przed misją Andreasa.
Więcej informacji:
Źródło: ESA
Zdjęcie: Łazik Eurobot, źródło: ESA





