Podczas 5. edycji zawodów European Rover Challenge porozmawialiśmy z Pantelisem Poulakisem - inżynierem Europejskiej Agencji Kosmicznej, odpowiedzialnym za konstrukcję systemu jezdnego pierwszego europejskiego łazika Rosalind Franklin. Europejski pojazd poleci w kierunku Czerwonej Planety w 2020 roku w ramach kontynuacji misji ExoMars.
Rafał Grabiański: Czy możesz opowiedzieć krótko o swojej roli w Europejskiej Agencji Kosmicznej?
Pantelis Poulakis: Od ostatnich pięciu lat jestem członkiem zespołu misji ExoMars i pracuje w zespole konstruktorów łazika Rosalind Franklin. ExoMars to program misji marsjańskich Europejskiej Agencji Kosmicznej. W 2016 wysłaliśmy w kierunku Marsa sondę Trace Gas Orbiter, która będzie służyć jako stacja przekaźnikowa dla łazika. W 2020 roku wyślemy misję składającą się ze statku transportowego, lądownika dostarczonego przez rosyjską agencję kosmiczną (Roskosmos - przyp. red.) i łazika, który jest właściwie głównym elementem całej misji. To łazik będzie odpowiedzialny za wszystkie planowane badania naukowe na powierzchni Marsa.
Inżynierowie pracujący nad łazikiem są podzieleni na kilka zespołów. Ja zajmuje się modułem jezdnym łazika. Moduł jezdny jest odpowiedzialny za wszystkie aspekty związane z poruszaniem się pojazdu. Jest to też najcięższy podsystem łazika - waży około 80 kg. W jego skład wchodzi: zawieszenie, wszystkie mechaniczne elementy układu zawieszenia i elektronika kontrolująca wszystkie ruchy. Naszym zadaniem było zaprojektowanie, zbudowanie i przetestowanie tego modułu i jego możliwości.
Jakie są możliwości systemu jezdnego łazika Rosalind Franklin? Jakie są zakładane odległości, które łazik ma pokonać w podstawowym czasie misji?
Warto poruszyć tutaj kilka zdolności w jaki wyposażył łazik jego system jezdny. Pierwsza rzecz to odległość jaką zakładamy, że łazik pokona w podstawowym czasie misji trwającym 280 dni marsjańskich. Ta ma wynieść maksymalnie 4 km. To ambitny cel. Jeżeli łazik będzie sprawnie funkcjonował po tym podstawowym czasie, misja zostanie rozszerzona. Ale łazik został zbudowany tak, by dać mu “gwarancję” przejechania 4-4,5 km podczas podstawowego czasu misji. Oczywiście w testach musieliśmy wykazać, że zbudowany system jest w stanie przejechać znacznie więcej - wielokrotności tego zakładanego dystansu.
Łazik ma sześć kół o stosunkowo niewielkiej średnicy (25 cm - przyp. red.). Duża masa pojazdu i niewielkie koła nie są dobrym połączeniem, dlatego wpadliśmy na interesujące rozwiązanie, które przypomina koła samochodowe, jednak zbudowane ze stali nierdzewnej i tytanu. Podczas poruszania się łazika, koła te ulegają deformacji co zwiększa ich roboczą średnicę. Dzięki temu uzyskujemy lepsze rozłożenie obciążenia. Elastyczne koła dopasowują się też lepiej do terenu, co może na przykład poprawić wjeżdżanie na skały, czy jazdę bo grząskim piasku.
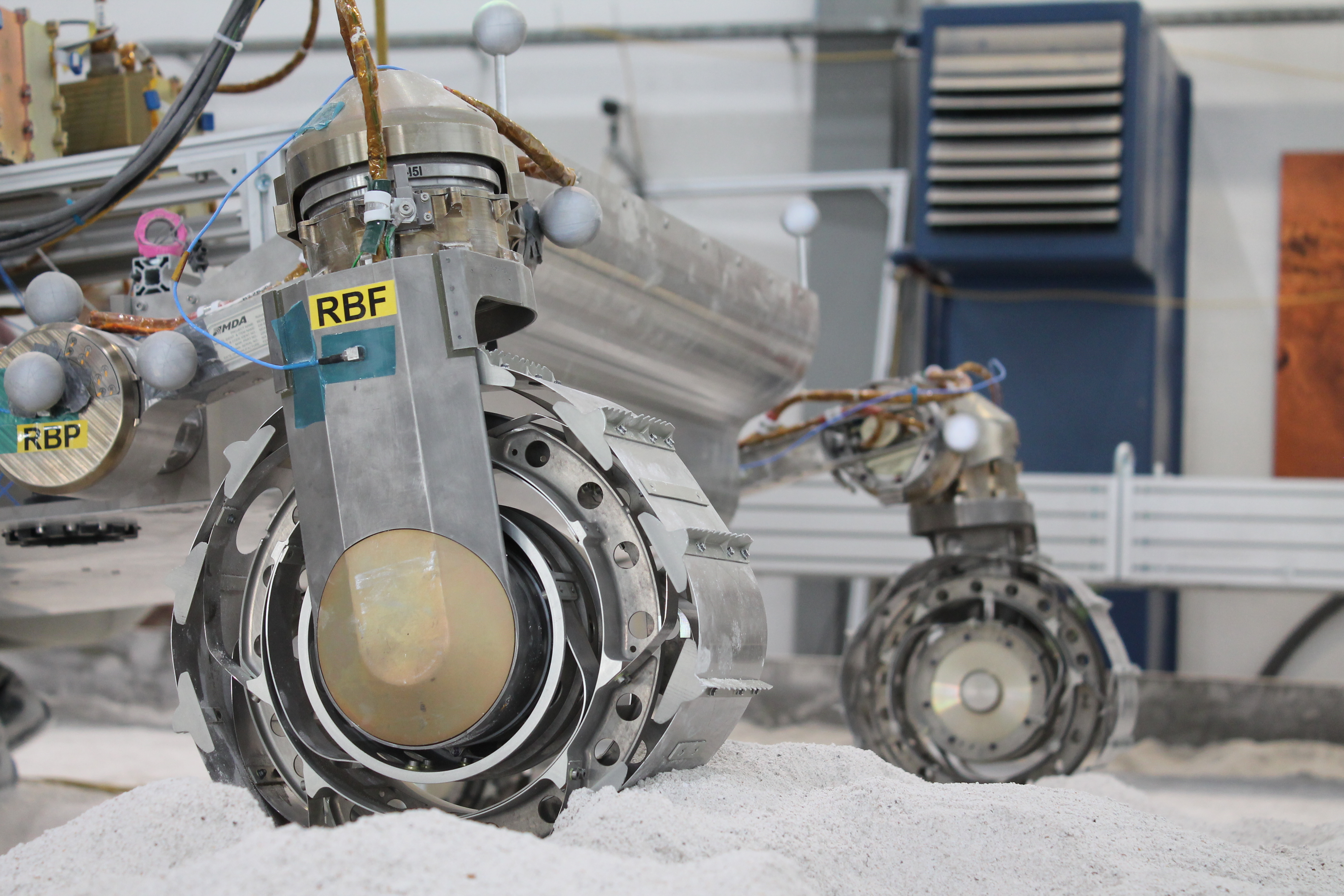 Koła łazika Rosalind Franklin. Źródło: ESA.
Koła łazika Rosalind Franklin. Źródło: ESA.
Kolejną ciekawą cechą systemu jezdnego jest system 6x6 - czyli mamy sześć kół, wszystkie napędzane i sterowane. Możemy dzięki temu poruszać się na przykład bokiem, efektywniej planować przemieszczanie się po terenie. Jeszcze inna szóstka może reprezentować sześć silników rozkładających system jezdny. Łazik podróżuje przed wylądowaniem w kapsule, złożony w kostkę. Dopiero po wylądowaniu rozkłada się, używając sześciu silników zamontowanych na ramionach zawieszenia. Taki sposób rozłożenia systemu jezdnego nie był jeszcze wykorzystywany. Silniki rozkładające mogą też służyć jako nogi łazika. Algorytm może wykorzystać dane z szybkości obrotu kół łazika i dostosować tak ruch zawieszenia, aby pojazd poruszał się jak dżdżownica, jednocześnie nie trąc kołami o powierzchnię. Taki skoordynowany ruch nazwaliśmy “wheel-walking” - jednoczesne chodzenie i jazda robota marsjańskiego.
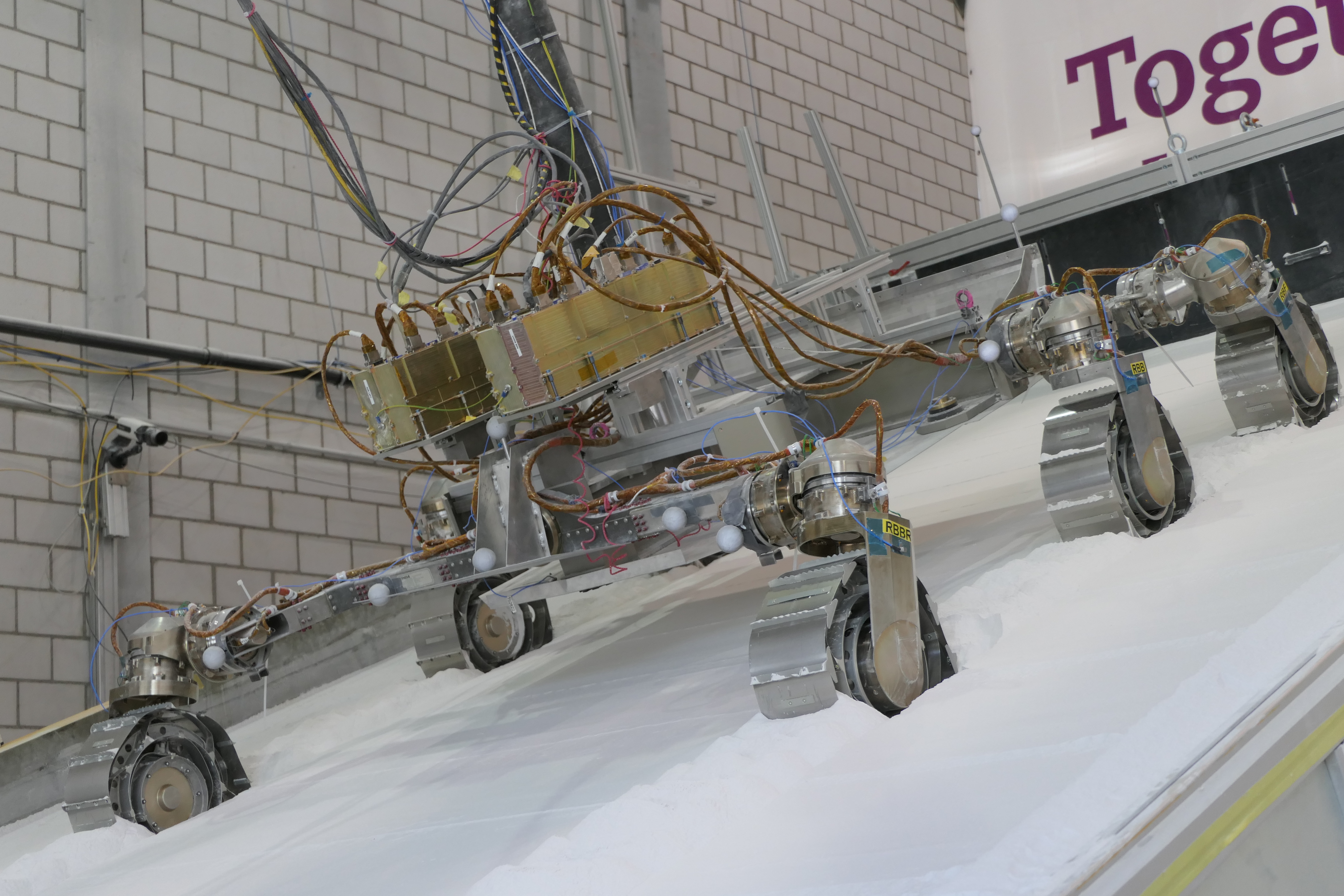
Ogromną zaletą takiego rozwiązania jest to, że gdybyśmy kiedykolwiek ugrzęźli łazikiem w trudnym terenie - podobnie jak to miało miejsce w przeszłości z łazikami Spirit i Opportunity - to mamy w zanadrzu technikę, która umożliwi ucieczkę z takiej sytuacji. Dzięki temu systemowi możemy wjechać łazikiem na bardzo stromy teren - coś co przetestowaliśmy niedawno.
Film ilustrujący system jezdny łazika Rosalind Franklin podczas testów. Źródło: ESA.
Jakie są maksymalne nachylenia na jaki gotowy jest łazik?
Dowiedliśmy do tej pory, że możemy pokonać łazikiem nachylenia do 26 stopni na niektórych typach powierzchni. Oczywiście ta liczba jest bardzo zależna od podłoża. To 26 stopni jest dla żwirowego podłoża. Ale myślimy, że łazik może pokonać znacznie bardziej stromy teren.
Te zdolności jezdne łazika dają nam dużą pewność. Inna zaleta tego, o której nie pomyślałbym przed podjęciem tej pracy to fakt, że operator łazika dzięki tym zdolnościom pojazdu prędzej może zgodzić się na wjazd na trudniejszy teren - tam gdzie naukowcy chcą, by łazik pojechał. W innym przypadku musielibyśmy być znacznie bardziej konserwatywni, dla bezpieczeństwa łazika.
Jakie były najtrudniejsze wyzwania przed jakimi stanął twój zespół podczas budowy tego systemu?
Podstawa to niezawodność. Lecąc w przestrzeń kosmiczną tracisz możliwość interwencji, jeśli coś pójdzie nie po twojej myśli. Twój moduł musi wytrzymać trudne warunki transportu i te panujące na planecie i musi być niezawodny w czasie operacji.
Ta niezawodność to najtrudniejszy aspekt budowy łazika, szczególnie w przypadku Europy, gdzie w misję zaangażowanych jest wiele państw i ogromna ilość podwykonawców i dostawców. Potrzebny jest margines w projekcie systemu i wysokie standardy jakości.
Za tym idzie kolejna trudność. Jeśli chcesz zwiększyć niezawodność i solidność konstrukcji idzie za tym zwiększenie masy i potrzebnych środków. Potrzebujesz więcej materiału, żeby zrobić trwalszą konstrukcję, a w misjach kosmicznych dążymy do jak najmniejszych mas ładunków z powodu ograniczeń zdolności nośnych rakiet. Dlatego wyzwaniem jest zachowanie równowagi pomiędzy niezawodnością i masą rozwiązania.
Czy miałeś już okazję zobaczyć pojazdy biorące udział w konkursie European Rover Challenge 2019?
Miałem już okazję spojrzeć na niektóre konstrukcje.
Co o nich myślisz? Coś przykuło twoją uwagę?
Tak, parę rzeczy przykuło moją uwagę. Możesz tam znaleźć sporo dobrych rozwiązań, ale też takich pomysłów, które nie działają. To przypomina mi czasy, gdy jeszcze studiowałem czy też pierwsze kontakty z robotyką, kiedy z nabraniem doświadczenia dochodzisz do wniosku, że pewnych rzeczy już byś tak nie zrobił. Dlatego taki konkurs to świetny sposób na to, by rozwijać pomysły, sprawdzać co zadziała. Odkrywanie złych rozwiązań pozwala ci się rozwijać. Tak samo użyteczne jest wpadanie na dobre jak i złe pomysły.
Dam taki przykład. Zobaczyłem tam robota z bardzo dużym korpusem i dużym ramieniem robotycznym, ale bardzo małymi kołami. Ciśnienie wywierane na powierzchnię zakopywało pojazd. Platforma była dobra i wystarczyłoby zwiększyć koła. Doskonale rozumiem ten zespół, bo sami mieliśmy podobne problemy z wielkością kół w łaziku Rosalind Franklin. Ale w tym samym zespole zauważyłem świetne rozwiązanie - łazik zmieniał położenie ramienia robotycznego, aby skorygować ten balans. To było sprytne rozwiązanie, które zwiększało efektywność robota.
Przeczytaj relację z zawodów European Rover Challenge 2019
Na koniec powróćmy jeszcze do misji ExoMars. Jak testowany był system jezdny łazika?
Testowanie łazika to tyle samo pracy, co jego projektowanie i budowa. Oczywiście na Marsie mamy inną grawitację, więc nie testujemy systemu jezdnego w dokładnie tej samej konfiguracji. Łazik jest zaprojektowany do pracy z marsjańską grawitacją, dlatego w pełnej skali w warunkach naszej planety byłby znacznie cięższy.
Żeby takie testy przeprowadzić zbudowaliśmy specjalny ośrodek w Szwajcarii, przeznaczony wyłącznie do testów łazika. Współpracowaliśmy z instytucjami geologicznymi, aby jak najlepiej odwzorować typy gruntu występujące na Marsie, później musieliśmy poszukać i kupić wymagane typy gleb. Zbudowaliśmy ogromną platformę, na której możemy umieszczać ten grunt w różnych konfiguracjach. Odwzorowaliśmy także rodzaje przeszkód terenowych jakie może napotkać nasz łazik. Następnie pozbawiliśmy testowy łazik wszystkich systemów. Został tylko jego system jezdny. Na tym zawieszeniu umieściliśmy specjalną strukturę, która miała odwzorować obciążenia jakie dozna właściwy łazik na powierzchni Marsa. Dzięki temu mogliśmy skupić się na testach naszego podsystemu w warunkach jak najbardziej zbliżonych do tych jakie spotka na Marsie.
Tak testowane są wszystkie elementy misji kosmicznych. Na przykład jeden z naszych głównych podwykonawców, firma Airbus zagospodarowała pomieszczenie takie jak to, w którym rozmawiamy, gdzie na płaskiej powierzchni umieściła wszystkie komponenty elektroniczne i testowała w ten sposób oprogramowanie łazika.
System jezdny ma swoje specyficzne cechy jeśli chodzi o testowanie. Cały ośrodek testowy w Szwajcarii naszpikowaliśmy różnego rodzaju czujnikami, żeby zebrać jak najwięcej danych o osiągach systemu jezdnego. Trudnością było też zaprojektowanie odpowiednich scenariuszy testowych - w jaki sposób mamy przetestować jazdę po wzniesieniu, jak przetestować przejazd przez przeszkody, jak przetestować zjazd z platformy lądującej - najryzykowniejszy element misji już po szczęśliwym wylądowaniu. Platforma może stanąć na skale, na nachylonej powierzchni. Na przykład w przypadku łazików Spirit i Opportunity obawiano się, że pojazdy mogą utknąć w poduszkach powietrznych. Dlatego w Zurychu zbudowaliśmy model platformy lądującej i wykonaliśmy dziesiątki testów wyjazdu łazika z platformy lądownika w wielu różnych konfiguracjach - różne nachylenia, różne ustawienia ramp zjazdowych.
Testy te wykazały, że o ile sam łazik dobrze poradził sobie z tym zadaniem to pewne założenia projektu lądownika okazały się być przez nas nieprzewidziane. Musieliśmy przystosować się bardzo szybko do tych obserwacji i wykonać ponowne testy.
Mamy nadzieję, że start i lądowanie łazika Rosalind Franklin powiedzie się!
Misje kosmiczne są trudne. Europa po raz pierwszy wysyła pojazd na Marsa, NASA ma w tym już większe doświadczenie. Ostatnio mamy też problemy ze spadochronami.
Tak, czytałem, że dwa testy głównych spadochronów nie zakończyły się powodzeniem.
Spadochrony na Marsie to niezwykle trudna rzecz. Przez bardzo cienką atmosferę, muszą otwierać się przy bardzo dużych prędkościach. To powoduje ogromne siły oddziałujące na jego strukturę podczas otwarcia. Trudnością jest też to, że nie istnieją ośrodki naziemne, w których można by takie testy wykonywać. Każdy pełnoskalowy test jest bardzo kosztowny. Mamy jeszcze dwa testy w przyszłym roku, mamy nadzieję, że uda się naprawić ten problem.
Przeczytaj też: Budowa pierwszego łazika marsjańskiego ukończona
Też na to liczymy!
Taki już jest urok misji kosmicznych. Są ekscytujące, trudne, niesamowicie satysfakcjonujące, ale zawsze idzie za nimi duże ryzyko. Trzeba się do tego przyzwyczaić. Możesz pracować nad czymś latami, po czym misja może nawet nie dotrzeć do celu.
Trzymamy kciuki za udany start misji w 2020 roku i udane lądowanie łazika na powierzchni w 2021!
Więcej informacji:
Na zdjęciu tytułowym: Pantelis Poulakis pozujący z najnowszym numerem czasopisma Urania - Postępy Astronomii.