
23 lutego na Księżycu wylądował z powodzeniem pierwszy komercyjny statek. Lądownik Nova-C "Odysseus" firmy Intuitive Machines przyziemił w kraterze Malapert A w rejonie bieguna południowego. Misja miała wiele trudności i samo lądowanie nie przebiegło tak jak planowano. Mimo to sonda wykonała dużą część planowanych zadań. Podsumujmy jak wyglądała ta misja i jakie były jej najważniejsze trudności.
Lądownik Nova-C "Odysseus" wylądował z przygodami na Księżycu 23 lutego. Pierwsze dni misji były bardzo trudne. Z kilkunastominutowym opóźnieniem dowiedzieliśmy się o udanym lądowaniu, a przez pewien czas niepewne było ułożenie lądownika. Wiadomo było tylko, że nie stoi on w planowany sposób pionowo na powierzchni. Przez złą orientację pierwsze kilka dni komunikacja z nim była utrudniona, a zespół misji pracował głównie nad ustaleniem jego stanu i poprawą kontaktu z nim.
Firma Intuitive Machines dopiero w kolejnych dniach pozyskała większą ilość danych z lądownika – telemetrię, dane naukowe z instrumentów na pokładzie oraz zdjęcia. Dzięki temu można było ustalić dokładne ułożenie statku na księżycowej powierzchni oraz odtworzyć wydarzenia z lądowania. Firma podzieliła się też szczegółami wielu problemów i sposobów ich przezwyciężenia w czasie trwania misji.
Problemy już po starcie
Zacznijmy od samego początku. Po tym jak rakieta Falcon 9 rozpędziła lądownik w kierunku trajektorii księżycowej i wypuściła go w samotną podróż, pojawił się pierwszy krytyczny problem. Odyseusz po wypuszczeniu miał wykonać tzw. „self-commissioning". Uruchamia on w tym czasie awionikę i szperacze gwiazd, za pomocą których program komputerowy może poznać orientację sondy i użyć silniczków kontroli orientacji, aby ustabilizować jego ułożenie i zwrócić ją w odpowiedni sposób. Odpowiednia orientacja zapewnia ładowanie baterii za pomocą paneli, prawidłową charakterystykę termiczną (statek nie przegrzewa się ani zbytnio nie ochładza) oraz optymalną komunikację z Ziemią.

Zdjęcie: Intuitive Machines
Niestety okazało się, że w warunkach lotu program ustalający orientację nie zadziałał poprawnie. Dane nawigacyjne były odrzucane przez system. To spowodowało, że sonda kontynuowała niewielki niekontrolowany obrót po oddzieleniu od rakiety i powoli rozładowywała swoje baterie. Gdyby nie podjąć ręcznych kroków po kilku godzinach misja byłaby utracona, bo akumulatory rozładowałyby się. Inżynierowie musieli wykorzystać niekontrolowany obrót, by „na ślepo” ustalić najefektywniejszą energetycznie orientację, zapisać ją i polecić sondzie ją ustalić do czasu wgrania poprawek w programie przetwarzającym dane nawigacyjne. Zadanie się udało.
Łącznie, jak stwierdzili przedstawiciele Intuitive Machines na konferencji, takich krytycznych problemów w ciągu całej misji kosmicznej było 11. Każde groził całkowitą utratą misji. To pokazuje też jak świetnie pracował zespół misji, ale też jak dużo szczęścia miał lądownik w wielu sytuacjach.
I o takim szczęściu na pewno można powiedzieć przy okazji omawiania kolejnego problemu…
Niedziałające lasery
To co zadziałało świetnie podczas misji to napęd. Drukowany w technologii addytywnej (3D) silnik główny lądownika, napędzany mieszanką ciekłego metanu i ciekłego tlenu wykonał udane próbne odpalenie i potem dwie udane korekty trajektorii. Jest to pierwszy silnik na paliwa kriogeniczne użyty w misji kosmicznej tak daleko od Ziemi i w ogóle pierwszy taki silnik kosmiczny napędzany metanem. Jego działanie było prawidłowe, bo uruchamiał się zgodnie z wysłanym profilem. Niestety jednak (chociaż okaże się później, że na szczęście) dane nawigacyjne na podstawie których planowano manewry korekcyjne nie były dokładne.
Położenie statku i jego zmiana w czasie pozwala na ustalenie jego orbity. Informacje o położeniu lecącego statku ustala się na podstawie komunikacji radiowej. Kierunek ustalamy na bazie siły sygnału, a odległość na podstawie czasu jaki zajmuje odebranie od statku wysłanego do niego sygnału. W przypadku tej misji wystąpiły pewne trudności, które spowodowały, że dane te nie były dokładne.
Kiedy przyszedł czas na wykonanie manewru wejścia na orbitę wokół Księżyca, celem misji było ustalenie kołowej orbity o konkretnych parametrach. Z powodu tych błędów nawigacyjnych orbita była jednak zbyt eliptyczna. Zespół misji zdecydował, że potrzebne będzie wykonanie manewru podniesienia orbity, aby pracować ze znanym i przetestowanym scenariuszu późniejszego zejścia z orbity i lądowania. Aby jednak ukołowić orbitę i mieć większą pewność zdecydowano się wcześniej niż planowano uruchomić wysokościomierze laserowe, które miały dać dokładne dane potrzebne do wykonania manewru.

Zdjęcie: Intuitive Machines.
I tu przyszedł największy kryzys całej misji. Okazało się, że urządzeń nie można uruchomić. Dalmierze laserowe są używane do precyzyjnego ustalania odległości od powierzchni i prędkości względem powierzchni. Dane z nich używa system kontroli lotu, by sterować i miękko wylądować. Lasery nie działały z prozaicznego powodu. Gdy statek był przygotowywany do misji jeszcze na Ziemi przeoczono zdjęcie z laserów blokad bezpieczeństwa. Usterki nie dało się już naprawić w locie, bo było to fizyczne zabezpieczenie. Fakt, że inżynierowie dowiedzieli się o niedziałających laserach wcześniej pozwoliło na szukanie planu awaryjnego. Nominalnie sprzęt ten miał zostać dopiero uruchomiony podczas manewru zniżania i lądowania.
Improwizacja na orbicie wokół Księżyca
Samo lądowanie zostało przełożone o około 2 godziny (jedną pełną orbitę wokół Księżyca). Nawigatorzy misji policzyli, że w lądowniku powinno zostać na tyle paliwa, by skompensować różnicę w położeniu Księżyca pod lądownikiem i nadal precyzyjnie wylądować w wyznaczonym obszarze. Pozostało tylko znaleźć na to sposób.
Zrządzeniem losu na pokładzie lądownika znajdował się eksperymentalny ładunek NASA, który służy właśnie nawigacji – dopplerowskie lasery LIDAR. Jest to jednak sprzęt, który miał być testowany i nie był integrowany w system czasu rzeczywistego obliczający dane nawigacyjne lądownika. Co więcej był on położony w zupełnie innym miejscu. Zespół miał pomysł napisania łatki w oprogramowaniu, która zapisywałaby w odpowiednich rejestrach komputera dane nawigacyjne z eksperymentalnego ładunku. Przed zapisem dane te musiały zostać transponowane (geometrycznie przekonwertowane), by oprogramowanie lądownika rozumiało je tak jakby pochodziły z niedziałających urządzeń.

Modele lądownika Nova-C z zaznaczonymi systemami nawigacyjnym. Na czerwono eksperymentalny system NDL, na zielono główne wysokościomierze laserowe. Źródło: Intuitive Machines.
Łatka sprawdziła się tylko częściowo. Ostatecznie okazało się, że gdy lądownik zniżał się nie jest w stanie odczytywać podawanych przez lasery danych w czasie rzeczywistym. Ostatni odczyt z wysokościomierza został wykonany jak Nova-C był jeszcze 15 km nad powierzchnią. Jak więc mimo tego sondzie udało się wylądować?
Oprogramowanie lądownika okazało się być odporniejsze na awarie sprzętowe. Szczęśliwie dla misji mimo braku twardych danych wysokościowych sonda szacowała swoją wysokość na bazie pośrednich danych: wcześniej znanej wysokości, danych z systemu nawigacji inercyjnej IMU i danych z nawigacji optycznej, służącej głównie do zwiększenia precyzji miejsca lądowania i omijania przeszkód terenowych. To wystarczyło, by z dosyć dużym błędem ustalić wysokość. Dosyć dużym, bo w ostatniej fazie lądownik myślał, że jest ponad 100 m nad powierzchnią, kiedy rzeczywiście już jej dotykał.
To spowodowało przyziemienie z 3 razy większą prędkością pionową niż planowano (3 m/s) i w ogóle nie pożądaną prędkością poziomą 1 m/s. To oczywiście oznaczało bardzo niestabilne dotknięcie powierzchni, złamanie jednej z sześciu nóg lądownika i ostatecznie przewrócenie się na bok. Odyseusz położył się w niekorzystnej pozycji na zboczu księżycowego krateru, ale działał.
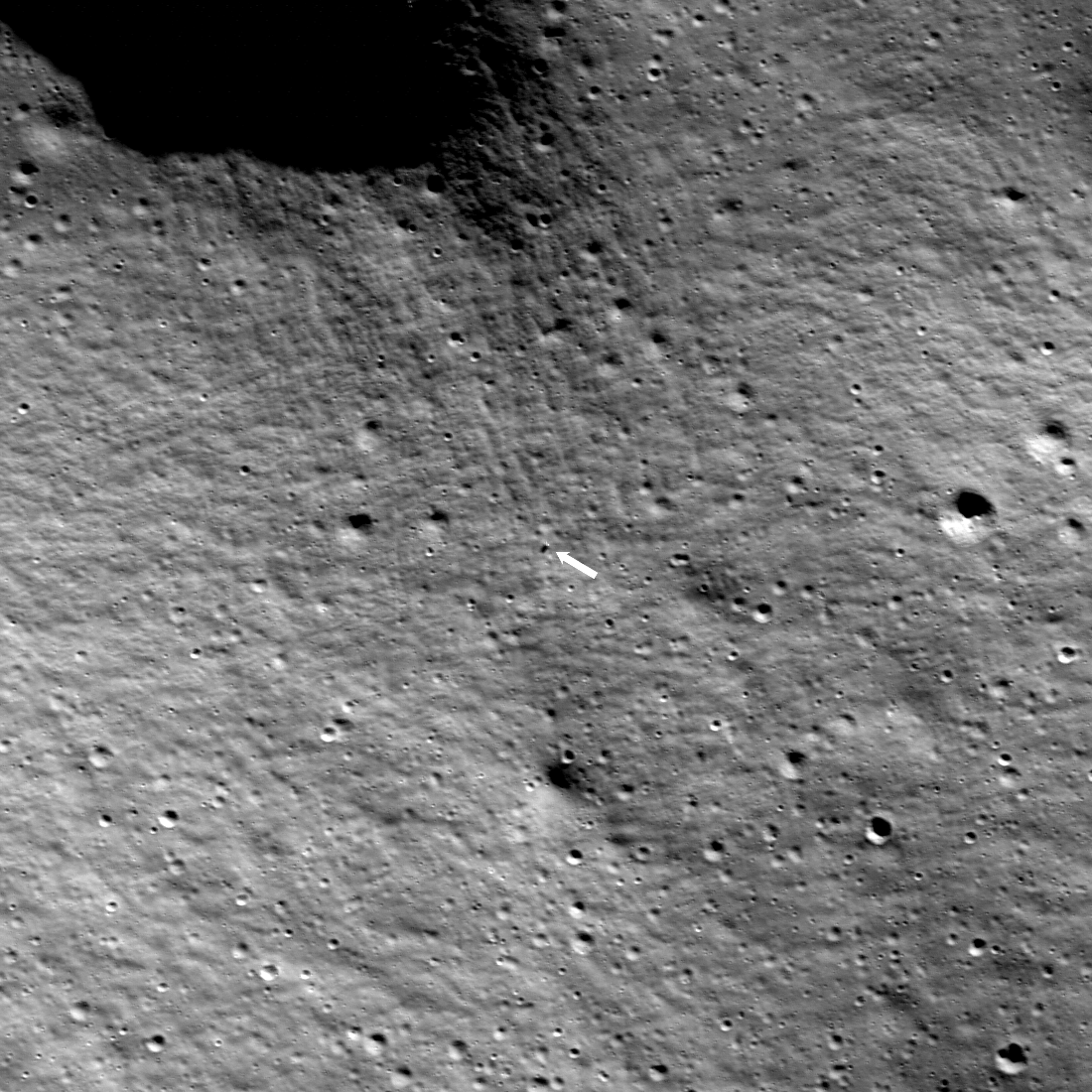
24 lutego nad miejscem lądowania Nova-C przelatywała amerykańska sonda LRO. Wykonała zdjęcia z wysokości około 90 km, na których widać leżący lądownik. Ustalono dokładną pozycję lądownika na 80,13 stopnia szerokości geograficznej południowej i 1,44 stopnia długości wschodniej. Jest to najbliższe bieguna południowego miejsce w jakim kiedykolwiek wylądowano na Księżycu. Dokładna topografia terenu to stary, mocno zerodowany już krater o średnicy około 1 km i nachyleniu terenu około 12 stopni.
Lądownik leży w sposób, w którym górny panel o największej powierzchni zbierającej energię słoneczną jest zwrócony na wschód. Początkowe szacunki na podstawie danych gromadzonych przez lądownik wskazywały, że korzystne położenie Ziemi i Słońca w takiej sytuacji pozwoli na działanie sondy do 27 lutego 2024 r. Ostatecznie jednak lądownik mógł pracować aż do 29 lutego.
Oprócz kwestii zbierania energii elektrycznej, jeszcze większym problemem wynikającym z nieplanowanej orientacji była komunikacja z lądownikiem. Przez pierwsze dni misji były pod tym względem bardzo trudne. Niedokładna znajomość orientacji i trudności w kalibracji anten naziemnych spowodowały, że przepustowość komunikacji była bardzo niska i dopiero 26 lutego opublikowano publiczne pierwsze, niskiej jakości zdjęcie z powierzchni.

Lądownik Nova-C ma 4 niewielkie anteny hemisferyczne niskiego zysku i jedną paraboliczną antenę wysokiego zysku. Żadna z nich nie jest sterowana. Przy planowanym lądowaniu statek miał specjalnie orientować się tak, by antena wysokiego zysku kierowała się w stronę nieba, gdzie widoczna jest Ziemia. Rzeczywiste ułożenie lądownika to uniemożliwiło, antena wysokiego zysku celowała znacznie wyżej, a komunikację dawały anteny niskiego zysku i to też nie wszystkie. Dwie z nich leżały blisko powierzchni z nachylonym terenem i nawet jeśli udało się przez nie komunikować to komunikacja ta była niskiej jakości (odbicia fal radiowych od powierzchni Księżyca).
Na szczęście zespołowi udało się tak skonfigurować działanie anten, że od 27 lutego zaczęto obserwować znacznie silniejszy sygnał, a co za tym idzie większą ilość przekazywanych danych. Na efekty nie trzeba było długo czekać, bo tego samego dnia sama firma Intuitive Machines opublikowała wysokiej jakości zdjęcia z operacji zniżania i pochwaliła się zgromadzeniem danych z instrumentów naukowych.
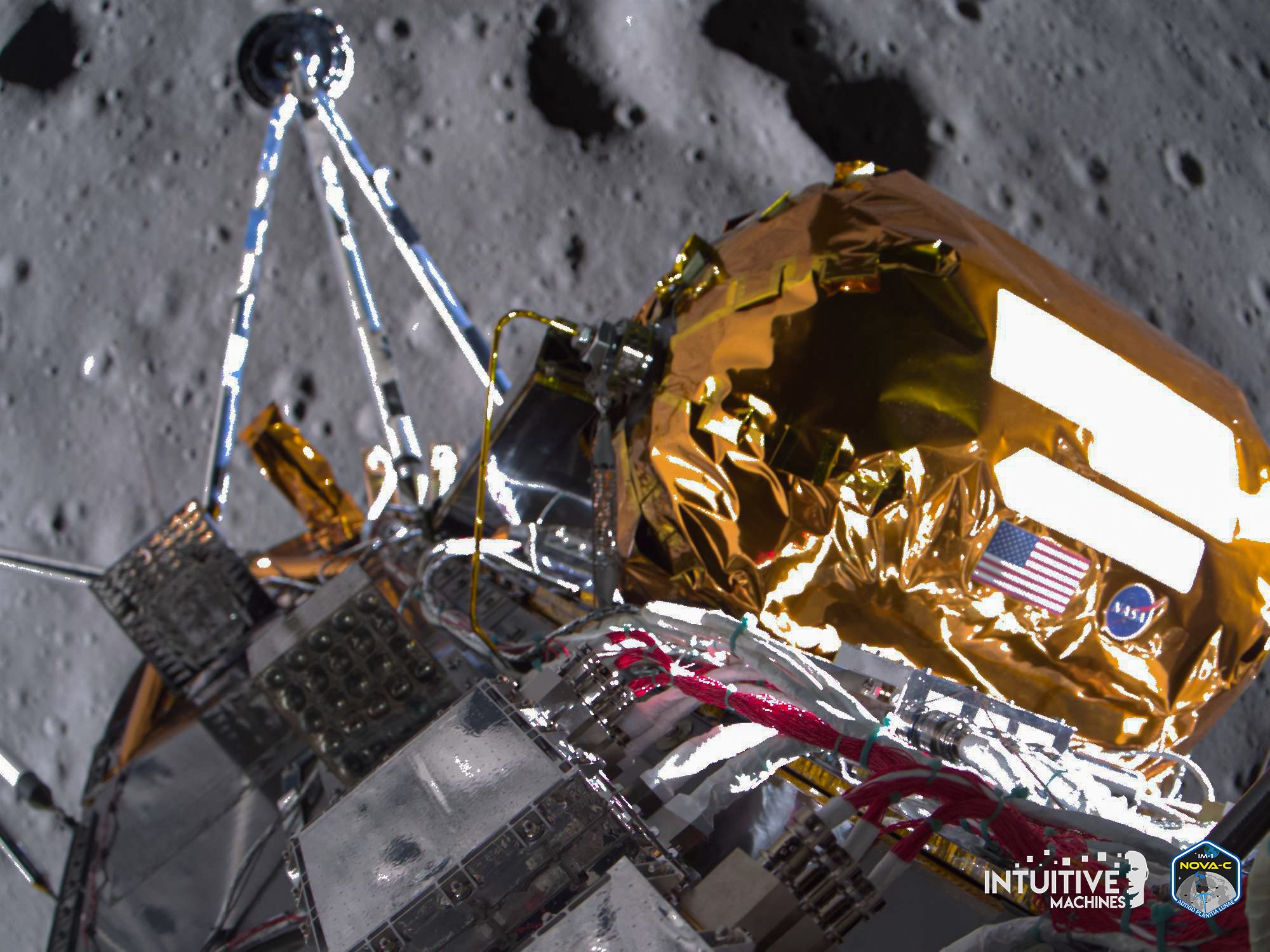
28 lutego podczas konferencji prasowej zobaczyliśmy zdjęcia z czasu tuż przed lądowaniem, momentu lądowania i momentu, gdy statek leżał już w końcowej orientacji na powierzchni Księżyca.
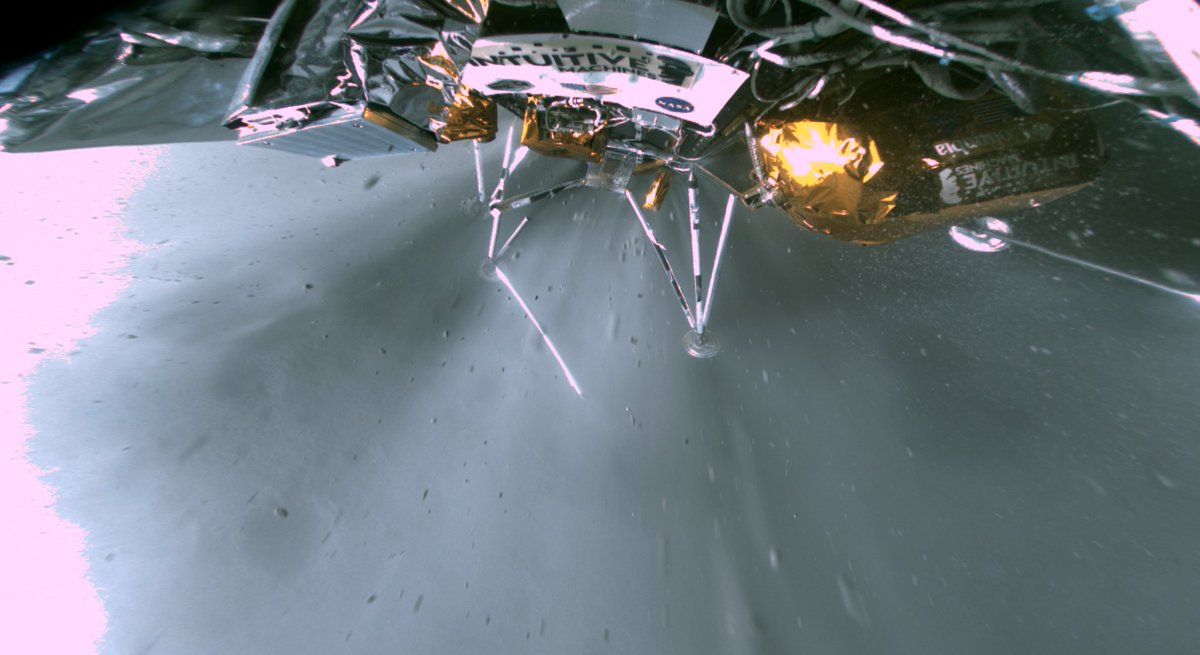
Lądownik około 30 m nad powierzchnią podczas lądowania. Źródło: Intuitive Machines.
Moment przyziemienia. Widać jedną z nóg lądownika przyjmujących zderzenie. Źródło: Intuitive Machines.

Zdjęcie wykonane już po wylądowaniu i ustabilizowaniu swojej orientacji. Źródło: Intuitive Machines.
Lądownik przerósł oczekiwania pod względem gospodarności baterią. Mimo wcześniejszych ostrożniejszych prognoz udawało się mu funkcjonować przez kolejne dni. Ostatnią planowaną komunikację przed wprowadzeniem sondy w stan hibernacji wykonano 29 lutego.
Teraz nad miejscem lądowania nadchodzi noc księżycowa, która potrwa 2 tygodnie. W drugiej połowie marca jak Słońce wzejdzie już na odpowiednią wysokość i zacznie ponownie ładować baterie sondy zespół misji podejmie próbę wybudzenia lądownika i kontynuowania misji.
Nadzieje wzbudzają losy innego lądownika. Japoński SLIM - nieprzystosowywany specjalnie do przetrwania nocy księżycowej - został z powodzeniem wybudzony i 25 lutego wznowił komunikację z Ziemią.
Opracowanie: Rafał Grabiański
Na podstawie: Intuitive Machines/NASA
Więcej informacji:
Na zdjęciu tytułowym: Lądownik Nova-C podchodzący do lądowania na Księżycu. Źródło: Intuitive Machines.





